 eMagazine
eMagazine  Facebook
Facebook  YouTube
YouTube ĐỜI SỐNG
Đột phá về bàn tay robot nắm bắt nhiều loại đồ vật
Thiện Thuật • 28-04-2023 • Lượt xem: 2621

.svg)

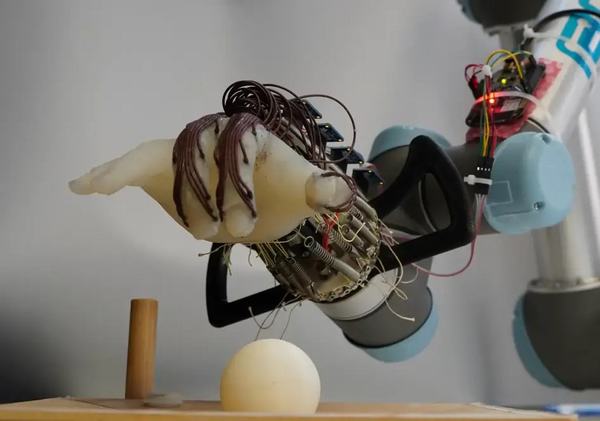




Các nhà nghiên cứu tại Đại học Cambridge, Anh, đã phát triển bàn tay robot tiết kiệm năng lượng và tiết kiệm chi phí có thể nắm bắt nhiều loại đồ vật khác nhau, bàn tay robot không làm rơi các vật thể khi sử dụng chuyển động của cổ tay và cảm giác trên lớp da của robot.
Thách thức của bàn tay robot
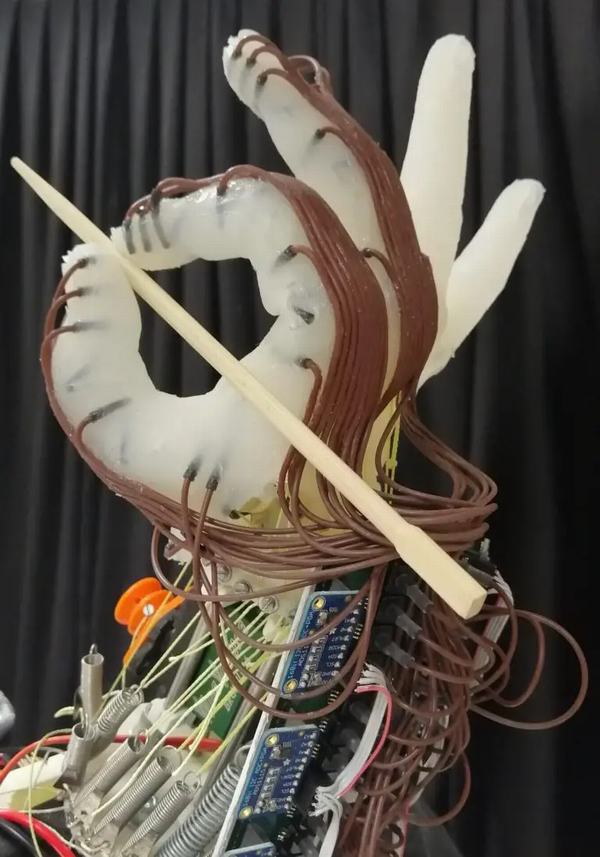
Thách thức của robot khi khả năng nắm bắt các vật thể có kích thước, hình dạng và kết cấu khác nhau là một nhiệm vụ không thể đơn giản so với con người. Để giải quyết vấn đề này, các nhà nghiên cứu từ Đại học Cambridge, Anh, đã tạo ra một bàn tay robot in 3D linh hoạt, dù không thể cử động các ngón tay một cách độc lập như con người nhưng vẫn có thể thực hiện một loạt các chuyển động phức tạp.
Tay robot đã được lập trình huấn luyện để nắm bắt các vật thể khác nhau và có thể dự đoán liệu nó có làm rơi chúng hay không bằng cách sử dụng thông tin do các cảm biến đặt trên da của nó cung cấp.
Tuy nhiên, ưu điểm chuyển động thụ động này giúp robot dễ điều khiển hơn và tiết kiệm năng lượng hơn nhiều so với robot có các ngón tay được điều khiển hoàn toàn bằng động cơ. Các nhà nghiên cứu cho biết thiết kế có thể thích ứng của họ có thể được sử dụng trong việc phát triển các loại robot giá rẻ có khả năng di chuyển tự nhiên hơn và có thể học cách nắm bắt nhiều loại vật thể. Các kết quả đã được báo cáo trên tạp chí Advanced Intelligent Systems.
Chuyển động trong thế giới tự nhiên là kết quả của sự tương tác giữa bộ não và cơ thể, điều này cho phép con người và động vật di chuyển theo những cách phức tạp mà không tiêu tốn nhiều năng lượng không cần thiết. Nhiều năm qua, các thành phần mềm đã bắt đầu được tích hợp vào thiết kế robot nhờ những tiến bộ trong kỹ thuật in 3D, cho phép các nhà nghiên cứu thêm độ phức tạp vào các hệ thống đơn giản, tiết kiệm năng lượng.
Bàn tay con người rất phức tạp và việc tái tạo tất cả sự khéo léo cũng như khả năng thích ứng của nó trong robot là một thách thức nghiên cứu lớn. Hầu hết các robot tiên tiến ngày nay không có khả năng điều khiển các nhiệm vụ mà trẻ nhỏ có thể thực hiện một cách dễ dàng. Theo bản năng con người biết cần dùng bao nhiêu lực khi nhặt một quả trứng, nhưng đối với robot, đây là một thách thức: quá nhiều lực và quả trứng có thể vỡ; quá ít và robot có thể làm rơi nó. Ngoài ra, một bàn tay robot được vận hành hoàn toàn, với các động cơ cho từng khớp ở mỗi ngón tay, cần một lượng năng lượng đáng kể.
Các nhà nghiên cứu đã và đang phát triển đã đưa ra giải pháp tiềm năng cho cả hai vấn đề cần thực hiện khi một bàn tay robot có thể nắm bắt nhiều loại vật thể với độ chính xác cao trong khi sử dụng một lượng năng lượng tối thiểu.
Các thử nghiệm cho bàn tay robot
Đồng tác giả của nghiên cứu, tiến sĩ Thomas George-Thuruthel hiện đang làm việc tại Đại học College London cho biết: “Trong các thí nghiệm trước đây, phòng thí nghiệm của chúng tôi đã chỉ ra rằng có thể đạt được phạm vi chuyển động đáng kể trong bàn tay robot chỉ bằng cách di chuyển cổ tay. Chúng tôi muốn xem liệu một bàn tay robot dựa trên chuyển động thụ động không chỉ có thể nắm bắt đồ vật mà còn có thể dự đoán liệu nó có làm rơi đồ vật hay không và điều chỉnh cho phù hợp”.
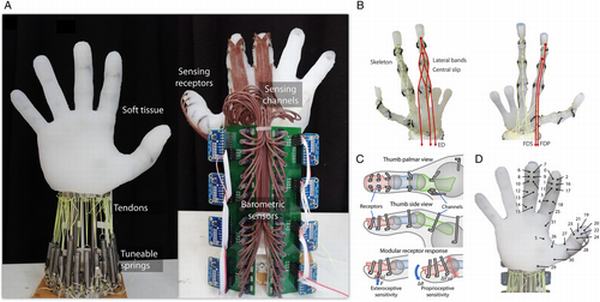
Các nhà nghiên cứu đã sử dụng một bàn tay hình người in 3D được cấy ghép các cảm biến xúc giác để bàn tay có thể cảm nhận được những gì nó đang chạm vào. Bàn tay chỉ có khả năng di chuyển thụ động dựa trên cổ tay.
Nhóm nghiên cứu đã thực hiện hơn 1200 thử nghiệm với bàn tay robot, quan sát khả năng nắm bắt các vật thể nhỏ mà không làm rơi chúng. Ban đầu bobot được huấn luyện bằng cách sử dụng những quả bóng nhựa in 3D nhỏ và nắm bắt chúng bằng một hành động được xác định trước.
Tiến sĩ Kieran Gilday, tác giả đầu tiên, hiện đang làm việc tại EPFL ở Lausanne, Thụy Sĩ, cho biết: “Loại bàn tay này có một chút độ đàn hồi, nó có thể tự nhặt đồ vật mà không cần bất kỳ hoạt động nào của các ngón tay. Các cảm biến xúc giác giúp robot biết được độ bám đang diễn ra tốt như thế nào, vì vậy nó biết khi nào nó bắt đầu trượt. Điều này giúp nó dự đoán khi nào mọi thứ sẽ thất bại”.
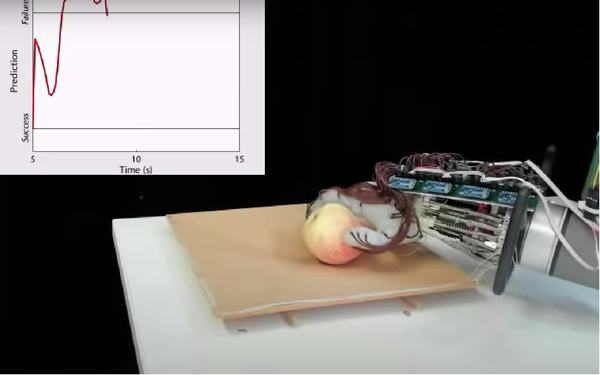
Robot đã sử dụng phương pháp thử và sai để tìm hiểu kiểu cầm nắm nào sẽ thành công. Sau khi kết thúc bài huấn luyện với những quả bóng, nó sau đó cố gắng nắm lấy các đồ vật khác nhau bao gồm một quả đào, một con chuột máy tính và một cuộn màng bọc bong bóng. Trong các thử nghiệm này, bàn tay đã có thể nắm bắt thành công 11 trong số 14 đồ vật.
Tiến sĩ George-Thuruthel cho biết thêm: “Các cảm biến, giống như lớp da của robot, đo áp suất tác dụng lên vật thể. Chúng tôi không thể nói chính xác thông tin mà robot đang nhận được, nhưng về mặt lý thuyết, nó có thể ước tính vị trí vật thể đã được nắm bắt và với lực bao nhiêu”.
Trong tương lai gần, hệ thống có thể được mở rộng theo nhiều cách, chẳng hạn như bằng cách thêm khả năng thị giác máy tính hoặc dạy robot khai thác môi trường của nó, điều này sẽ cho phép nó nắm bắt được nhiều đối tượng hơn.

1
2
3
4
5
6
7
8
9
10
.jpg)
![[Thủ đoạn thời 4.0] Kỳ 6: Bẫy tình thời online - Khi 'thợ săn' là 'trai tài, gái sắc'](https://duyendangvietnam.net.vn/public/uploads/file1s/doa-gui-anh-nong-750x416(1).jpg)
(1).jpg)

.jpg)
Vận hành bởi Công ty Cổ phần Tập đoàn Truyền thông Thanh Niên
Địa chỉ: 345/134 Trần Hưng Đạo, Phường Cầu Ông Lãnh, TP.HCM.
Điện thoại: 028 39209815 - 282 | Fax: 028 39209824
Hotline: 0971.656.533
Email: info@thanhniencorp.com.vn
Giấy phép MXH số 23/GP-BTTTT do Bộ TT&TT cấp.
Ngày cấp: 14/01/2016.
Điều hành: Nguyễn Sơn Trà




